Hi OpenCN developer,
I tried to execute trajectory planning using generated c++ files in <opencn_home>/agency/usr/matlab/x86/matlab/generated. I was trying to generate trajectory points by following the approach given in the file: <opencn_home>/agency/usr/rs274ngc/main.cpp, basic lines are:
ocn::FeedoptDefaultConfig(&cfg);
ocn::ConfigSetSource(&cfg, “Test.ngc”, {1, 8});
ocn::FeedoptContext ctx;
InitFeedoptPlan(cfg, &ctx);
bool optimized = false;
ocn::CurvStruct Curv;
while (ctx.op != ocn::Fopt::Fopt_Opt) {
ocn::FeedoptPlan(&ctx, &optimized, &Curv);
if (optimized) {
ctx.go_next = true;
optimized = false;
}
}
for(int i = 0; i < ctx.q_split.size(); i++) {
ocn::CurvStruct tmp_curv;
ctx.q_split.get(i + 1, &tmp_curv);
add_curv(&tmp_curv,&ctx,fptr,fptrY);
}
function add_curv, gets a spline object from ctx->q_splines and calls EvalPosition to compute the trajectory points.
void add_curv(const ocn::CurvStruct *c,const ocn::FeedoptContext *ctx, FILE *fptr, FILE *fptrY) {
ocn::CurvStruct Spline;
ctx->q_splines.get(c->sp_index, &Spline);
const int N = 60;
for(int i = 0; i < N; i++) {
ocn::EvalPosition(c, &Spline, (float)i/(N - 1), r0D);
//code to write r0D[0] (x-coordinate), and r0D[1] (y-coordinate) in file pointer *fptr and *fptrY respectively
//
}
r0D is static array of double, and I am writing corresponding 8 bytes of double to the opened file pointers.
My Test.ngc looks as follow:
G17 G21 G40 G49
G64 P2.0
(G61.1)
G00 X0 Y0 Z0
G1 X1 Y0 Z0
G1 X1 Y1 Z0
M2
My FeedoptDefaultConfig is as follow:
cfg->NDiscr = 140;
cfg->NBreak = 60;
cfg->UseDynamicBreakpoints = false;
cfg->UseLinearBreakpoints = true;
cfg->DynamicBreakpointsDistance = 0.1;
cfg->NHorz = 5;
cfg->vmax = 15.0;
cfg->amax[0] = 20.0;
cfg->jmax[0] = 2000;
cfg->amax[1] = 20.0;
cfg->jmax[1] = 2000;
cfg->amax[2] = 20.0;
cfg->jmax[2] = 2000;
cfg->SplineDegree = 4;
cfg->CutOff = 0.1;
cfg->LSplit = 3.0;
cfg->LThreshold = 0.3;
cfg->CuspThreshold = 45.0;
cfg->v_0 = 0.1;
cfg->at_0 = 0.0;
cfg->v_1 = 0.1;
cfg->at_1 = 0.0;
// cfg->dt = 0.0001;
cfg->dt = 0.001;
cfg->ZeroStartAccLimit = 0.01;
cfg->ZeroStartJerkLimit = 1.0;
cfg->ZeroStartVelLimit = 0.5;
std::memset(&cfg->source[0], 0, 1024U * sizeof(char));
cfg->DebugCutZero = false;
cfg->Compressing.Skip = false;
cfg->Compressing.ColTolDeg = 5.0;
cfg->CollTolDeg = 1.0E-6;
cfg->NGridLengthSpline = 10.0;
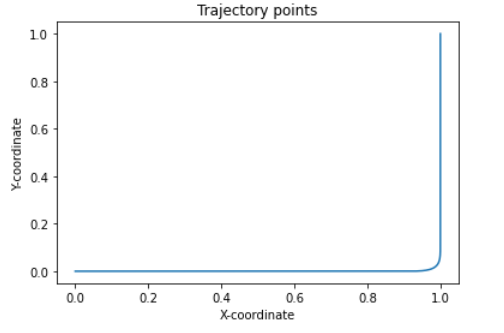
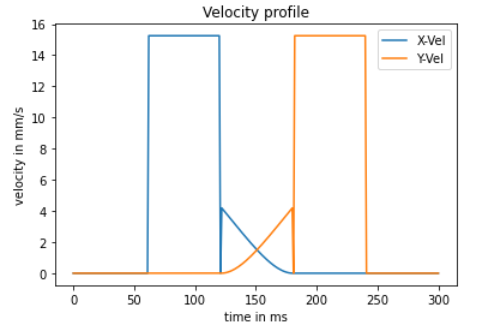
Though generated trajectory points seem to be correct according to the graph, but the velocity profile is not smooth leading to discontinuous acceleration, which leads to infinite jerk.
I am attaching plot of my velocity profile for reference.
Can you please give me some advice about possible mistake in my implementation?
Thank you